Southern Methodist University alimləri mikrorobotların hərəkətini real vaxt rejimində izləmədən idarə edən yeni maqnit sarğıları sistemi hazırlayıblar. İndiyə qədər mövcud olan sistemlərin əksəriyyəti robotların mövqeyini izləmək üçün kameralara və ya vizuallaşdırma alətlərinə etibar edirdi. Lakin bu ənənəvi üsullar insan bədəni və ya sənaye boruları kimi məhdud görünüşlü mühitlərdə yavaş, bahalı və etibarsız ola bilər. Yeni texnologiya isə bu asılılığı tamamilə aradan qaldırır.
Layihənin aparıcı ixtiraçısı Sanqvon Li bildirib ki, yeni sistem iş sahəsindəki mövqeyindən asılı olmayaraq mikrorobotlara daimi güc tətbiq edən bircins maqnit sahəsi qradiyenti yaradır. Robotun mövqeyinə görə qüvvələri davamlı olaraq tənzimləmək əvəzinə, sistem onların bütün sahə boyu eyni maqnit cazibəsini hiss etməsini təmin edir. Nəticədə, dəqiq naviqasiya üçün kritik hesab edilən mövqe məlumatlarının davamlı yenilənməsinə ehtiyac qalmır.
Bu texnologiya necə işləyir?
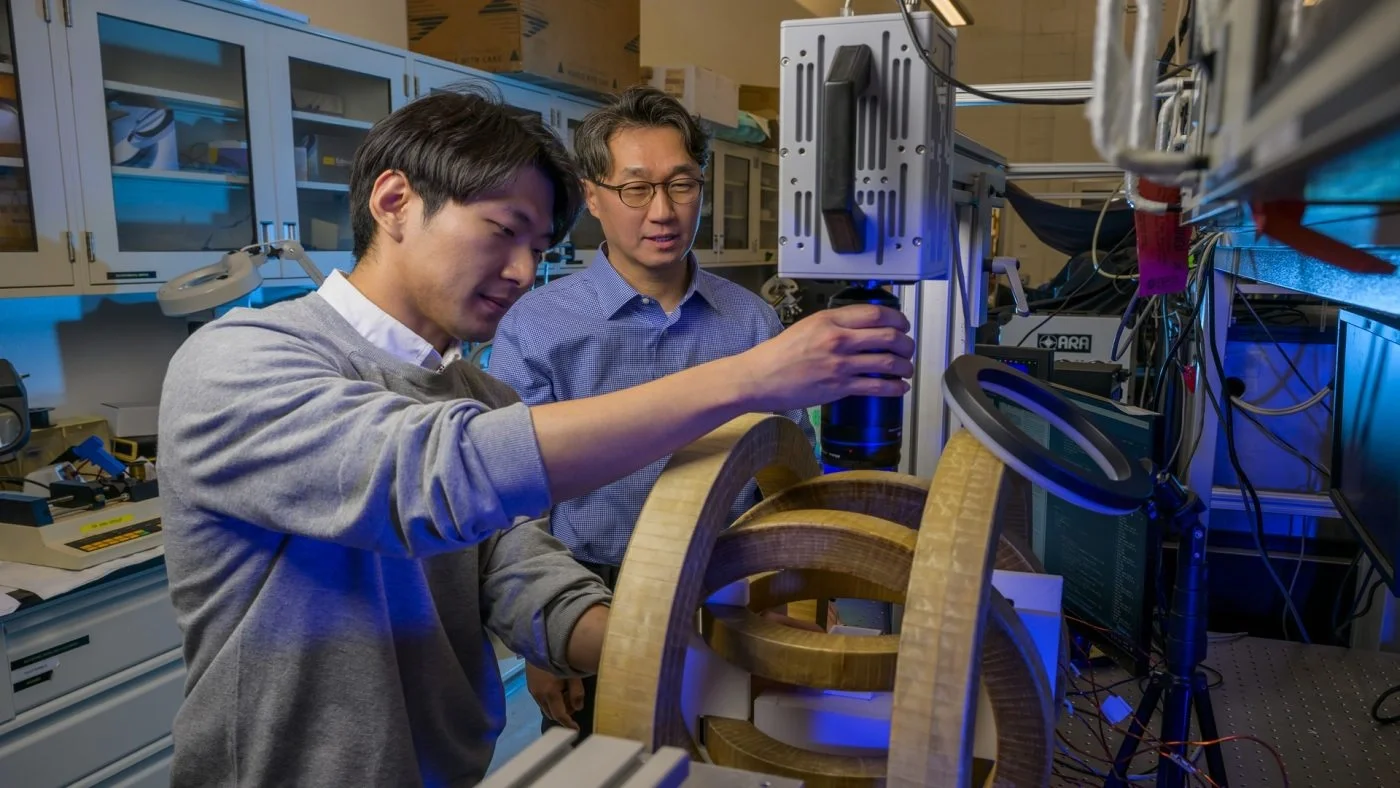
Üçölçülü maqnit sahələri yaratmaq üçün qurğu X, Y və Z oxları boyunca üç cüt şəklində yerləşdirilmiş altı sarğıdan istifadə edir. Dəqiqliyi təmin etmək məqsədilə sistem triaksial maqnitometr vasitəsilə kalibrlənib. Tədqiqatçılar hər bir sarğı üçün düzgün cərəyanı hesablamaq və uyğunsuzluqdan yaranan xətaların qarşısını almaq üçün Tixonov requlyarizasiyası adlanan riyazi yanaşma tətbiq ediblər. Testlər zamanı maqnit sahəsinin proqnozlaşdırılan və müşahidə edilən davranışı arasında 99 faiz uyğunluq qeydə alınıb.
"COMSOL" mühitində aparılan simulyasiyalar və real şəraitdəki sınaqlar sistemin etibarlılığını sübut edib. Helmholtz sarğıları olan triaksial alət kimi tanınan bu sistem, bütün istiqamətlərdə idarə olunan maqnit sahələri yaratmaq qabiliyyətinə malikdir. Modelləşdirmə və təcrübələrin bu cür birləşməsi təsdiqləyib ki, qurğu vizuallaşdırma sistemlərindən davamlı əks-əlaqə olmadan mikrorobotları etibarlı şəkildə istiqamətləndirə bilər.
Tibb və sənayedə hansı imkanlar yaranır?
Mikrorobotların vizual izləmə olmadan idarə edilməsi tibb və sənaye sahələrində inqilabi imkanlar vəd edir. Sanqvon Li qeyd edib ki, bu nailiyyət xüsusilə biotibbi tətbiqlər üçün vacibdir, çünki mikrorobotlar dərmanları dəqiq ünvanlara çatdıra, az invaziv prosedurlar həyata keçirə və ənənəvi alətlər üçün əlçatmaz olan nahiyələrdə diaqnostika apara bilər. Hazırda tədqiqatçılar mürəkkəb mühitlərdə idarəetməni daha da təkmilləşdirmək üçün kameralardan fərqli sensorlardan istifadə edərək robotların mövqeyini qiymətləndirməyin alternativ yollarını öyrənirlər. Qeyd edək ki, bu mühüm tədqiqat "IEEE Access" jurnalında dərc olunub.